Tiempo de respuesta de control
Cuando se controlan activos (EVs, baterías), el Sofar EMS envía un comando al dispositivo, que luego necesita tiempo para procesar este comando y ajustar su estado en consecuencia. Esto se conoce como el tiempo de respuesta de control.
El tiempo necesario para esto, y el tiempo que tarda el Sofar EMS en enviar un nuevo comando, depende de los siguientes factores:
- El tipo de dispositivo (p. ej., batería, cargador de EV, bomba de calor)
- La verificación de estabilización
- Limitación en el bus RS485
- El intervalo del programador
Cuando su Sofar EMS está activo en servicios auxiliares, un tiempo de respuesta rápido es crucial.
En esta página, explicaremos cómo estos factores influyen en el tiempo de respuesta de control y cómo puede optimizarlo para su caso de uso específico.
Consejo
Puntos clave:
- No utilice Modbus-RTU (RS485) cuando haya múltiples dispositivos conectados al bus RS485. Use Modbus-TCP en su lugar.
- Desactive las configuraciones de rampa ascendente y descendente en dispositivos que lo soporten, como baterías e inversores, para permitir tiempos de respuesta más rápidos.
- Desactive la verificación de estabilización, si entiende las implicaciones.
- Configure el intervalo del programador a 1 segundo para un procesamiento de comandos más rápido.
Para la explicación completa de estos factores, continúe leyendo a continuación.
El tipo de dispositivo
Diferentes tipos de dispositivos tienen tiempos de respuesta inherentemente diferentes debido a sus características técnicas y protocolos de comunicación:
Baterías y/o inversores solares (incluidos inversores híbridos)
- Tiempos de respuesta típicamente rápidos (1-5 segundos)
- El tiempo de respuesta depende principalmente de los controles internos del inversor
- Pueden tener tasas de rampa integradas para transiciones de potencia
Cargadores de EV
- Tiempo de respuesta medio (5-15 segundos)
- La respuesta depende de:
- Protocolo de comunicación (OCPP, Modbus, propietario)
- Capacidades de carga del vehículo
- Estado actual de carga
- Deben respetar los requisitos mínimos de corriente de carga
Bombas de calor
- Tiempos de respuesta más lentos (30-180 segundos)
- Ajustes graduales de potencia para proteger el compresor
- El tiempo de respuesta se ve afectado por:
- Modo de operación (calefacción/refrigeración)
- Condiciones actuales de temperatura
- Mecanismos internos de protección
Relés e interruptores
- Tiempos de respuesta rápidos (1-5 segundos)
- Normalmente usados para control simple de encendido/apagado
Consejo
Para un control óptimo, considere el dispositivo con la respuesta más lenta al configurar sus parámetros de control. Esto garantiza una operación estable en todos los dispositivos conectados.
La 'Verificación de estabilización'
Cuando se trabaja con múltiples marcas, protocolos y modelos de dispositivos, la paciencia se vuelve esencial. Aunque dispositivos como baterías, inversores y cargadores de EV típicamente responden rápido a los comandos, necesitan tiempo para actualizar sus mediciones y enviarlas de vuelta al EMS.
Dos factores clave afectan los tiempos de respuesta:
- Los medidores de energía pueden enviar datos a tasas más lentas, lo que significa que no reflejan inmediatamente las últimas acciones del dispositivo
- Los dispositivos a menudo necesitan tiempo para aumentar la potencia y estabilizarse para alcanzar sus estados objetivo
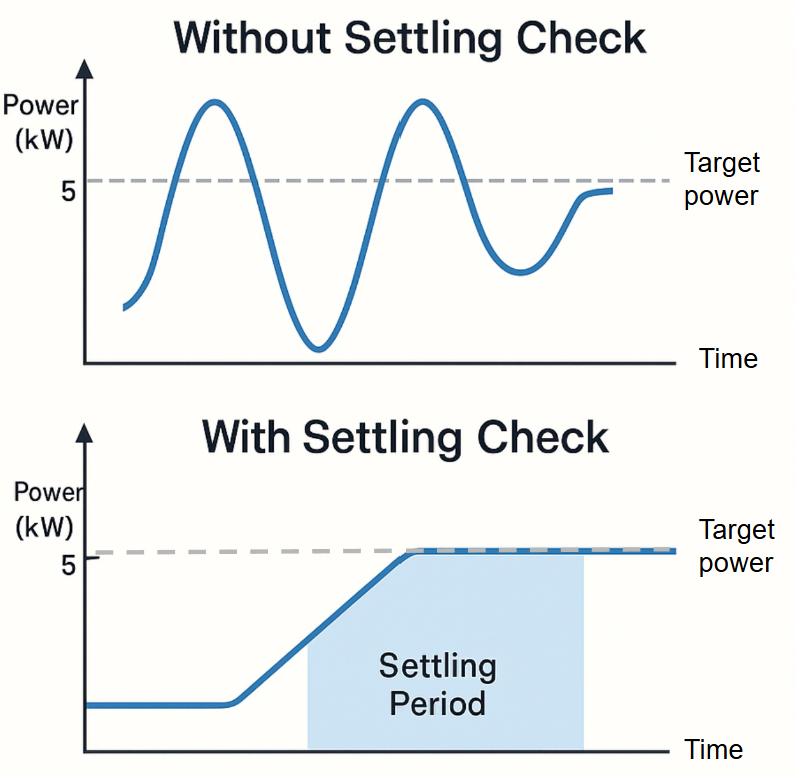
Aquí es donde las verificaciones de estabilización son importantes. Una verificación de estabilización es un período de espera que asegura que los dispositivos hayan alcanzado completamente sus estados ordenados antes de tomar nuevas decisiones. Piénselo como dejar que se asiente el polvo después de un cambio. Sin este mecanismo, nuestro sistema de control podría reaccionar a estados temporales durante el período de transición. Esto conduciría a correcciones innecesarias, similar a intentar equilibrarse en una plataforma inestable mientras se corrige constantemente, empeorando la situación.
Nuestra implementación monitorea tres aspectos cruciales: Primero, verifica que las mediciones sean recientes y confiables, asegurando que no reaccionemos a información desactualizada. Segundo, rastrea cómo cambian los flujos de energía con el tiempo, confirmando que los dispositivos respondan como se espera. Finalmente, respeta los retrasos inherentes en las respuestas de los dispositivos, dando al equipo el tiempo que necesita para alcanzar una operación estable.
Considere un sitio con dos dispositivos: un sistema moderno de baterías y una bomba de calor antigua. Cuando enviamos un comando para reducir el consumo de energía en 5kW:
| Tiempo | Batería | Bomba de calor | Respuesta del sistema |
|---|---|---|---|
| 0:00 | 0kW | 5kW | Comando enviado: reducir 5kW |
| 0:01 | -2kW | 5kW | La batería responde rápido |
| 0:03 | -2kW | 3kW | La bomba de calor empieza a responder |
| 0:05 | -2kW | 3kW | Esperando estabilidad |
| 0:07 | -2kW | 3kW | El sistema confirma estado estabilizado |
La batería responde casi inmediatamente, pero el sistema de control más antiguo de la bomba de calor tarda más en ajustar y reportar su nuevo estado. Sin las verificaciones de estabilización, podríamos interpretar este retraso como una falla en la respuesta y enviar comandos adicionales, potencialmente desestabilizando el sistema. En cambio, nuestro controlador espera pacientemente a que todos los dispositivos reporten estados estables antes de tomar nuevas decisiones.
La línea de tiempo para este flujo exacto se ve así:
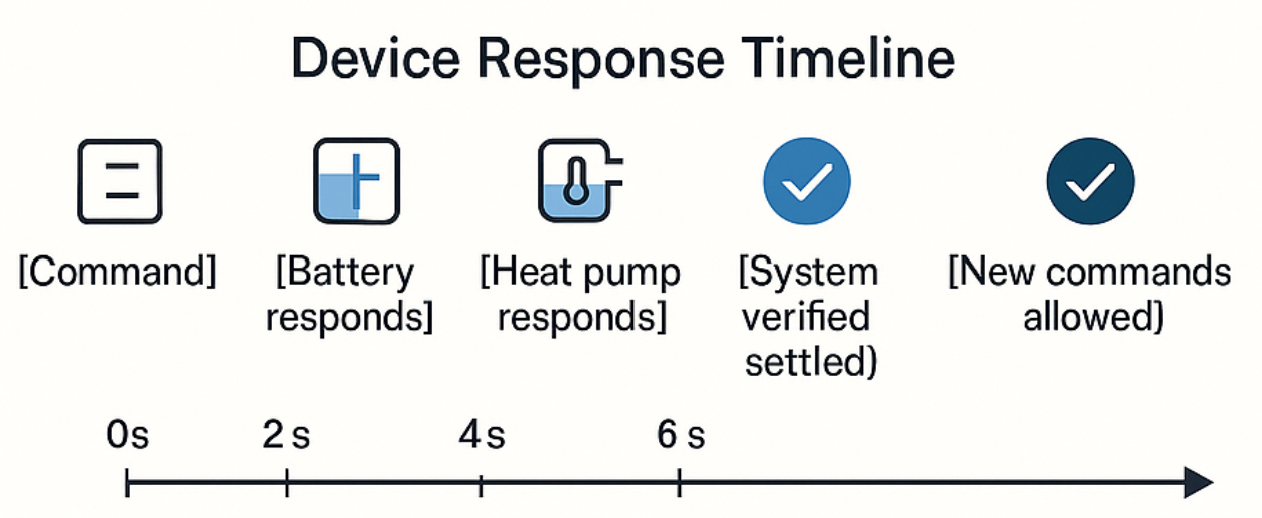
Este enfoque medido puede parecer excesivamente cauteloso, pero en el mundo de los sistemas eléctricos, la estabilidad y la longevidad del equipo superan con creces el atractivo de ajustes rápidos e incesantes.
Desactivar la verificación de estabilización
Advertencia
- No se recomienda desactivarla y solo debe hacerse en casos excepcionales. De lo contrario, corre el riesgo de desestabilizar el sistema y causar oscilaciones.
- Proceda con precaución y solo si comprende completamente las implicaciones y prefiere velocidad sobre estabilidad.
La verificación de estabilización puede desactivarse en la aplicación Sofar EMS bajo las configuraciones avanzadas. Esto permitirá que el controlador envíe comandos sin esperar a que los dispositivos se estabilicen, potencialmente acelerando el tiempo de respuesta.
Click here to see the instructions
- Abra la página de configuraciones:
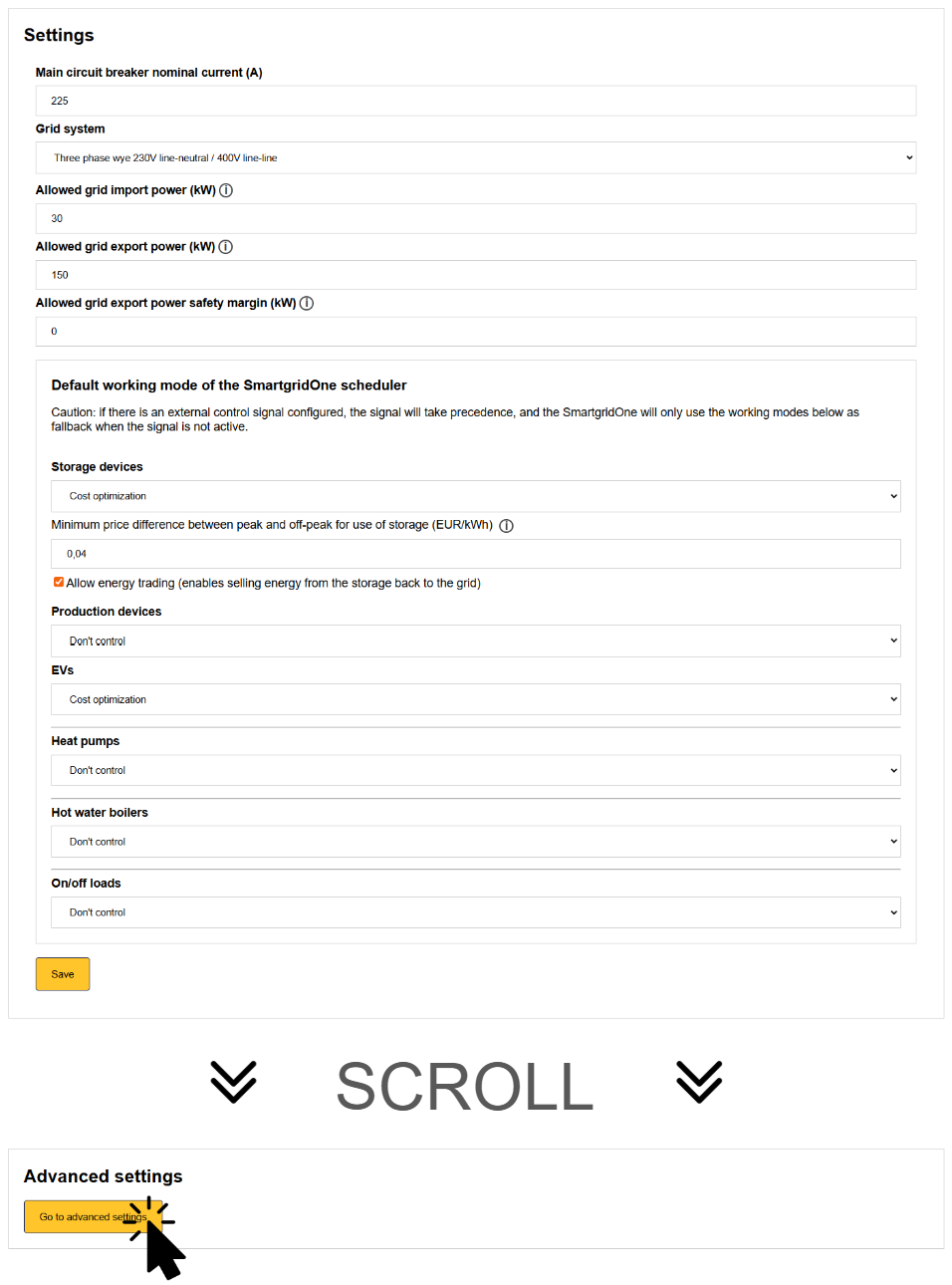
- Cambie "Enable device settling check" a
False:
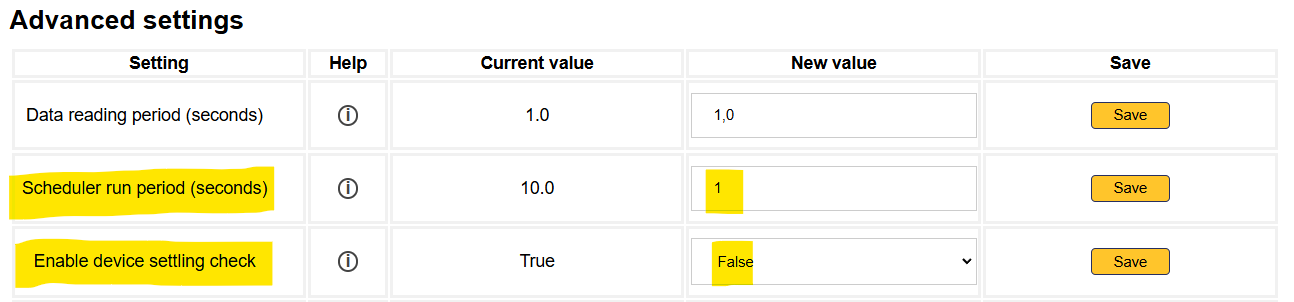
- Haga clic en 'Guardar' a la derecha de la fila.
Limitación en el bus RS485
Cuando múltiples dispositivos están conectados al bus RS485, el tiempo de respuesta de control puede verse afectado debido a la limitación inherente de la comunicación RS485: solo un dispositivo puede comunicarse a la vez.
A medida que los dispositivos se turnan para comunicarse a través del bus, cada dispositivo adicional aumenta el tiempo total del ciclo de comunicación. Esto puede desembocar en tiempos de respuesta más lentos para todos los dispositivos conectados.
Para un rendimiento óptimo:
- Limite el número de dispositivos a 5 o menos por bus RS485
- Use accesorios de expansión RS485 al conectar más dispositivos
Consejo
Para información detallada sobre el cableado RS485 y mejores prácticas, consulte la guía Wiring Best Practices.
Intervalo del programador
El intervalo del programador determina con qué frecuencia el Sofar EMS verifica la existencia de nuevos comandos y los envía a los dispositivos. Un intervalo más corto permite tiempos de respuesta más rápidos, mientras que un intervalo más largo puede causar demoras en la ejecución de comandos.
Verifique si el intervalo del programador está configurado en un valor razonable para su caso de uso. El intervalo predeterminado es de 1 segundo, pero puede ajustarlo en la configuración avanzada:
Click here to see the instructions
- Abra la página de configuraciones:
- Cambie "Enable device settling check" a
False:
- Haga clic en 'Guardar' a la derecha de la fila.