Cette page décrit la communication avec un onduleur Autarco série OX raccordé au réseau via Modbus-RTU (rs485).
Par défaut, l'onduleur est configuré sur l'adresse 1.
Les onduleurs OX disposent des ports de communication suivants :
- COM1 : connecteur vert 4 broches pour datalogger WiFi/Cellulaire.
- COM2 et COM3 : presse-étoupes et couvercle avec les points de connexion suivants derrière :
- 2 x connexions RJ45
- 1 x bloc terminal RS485
Plus précisément pour le Sofar EMS, la communication RS485 se fait via le port 'Bloc terminal COM2'. Celui-ci est marqué dans le cadre orange sur l'image ci-dessous :
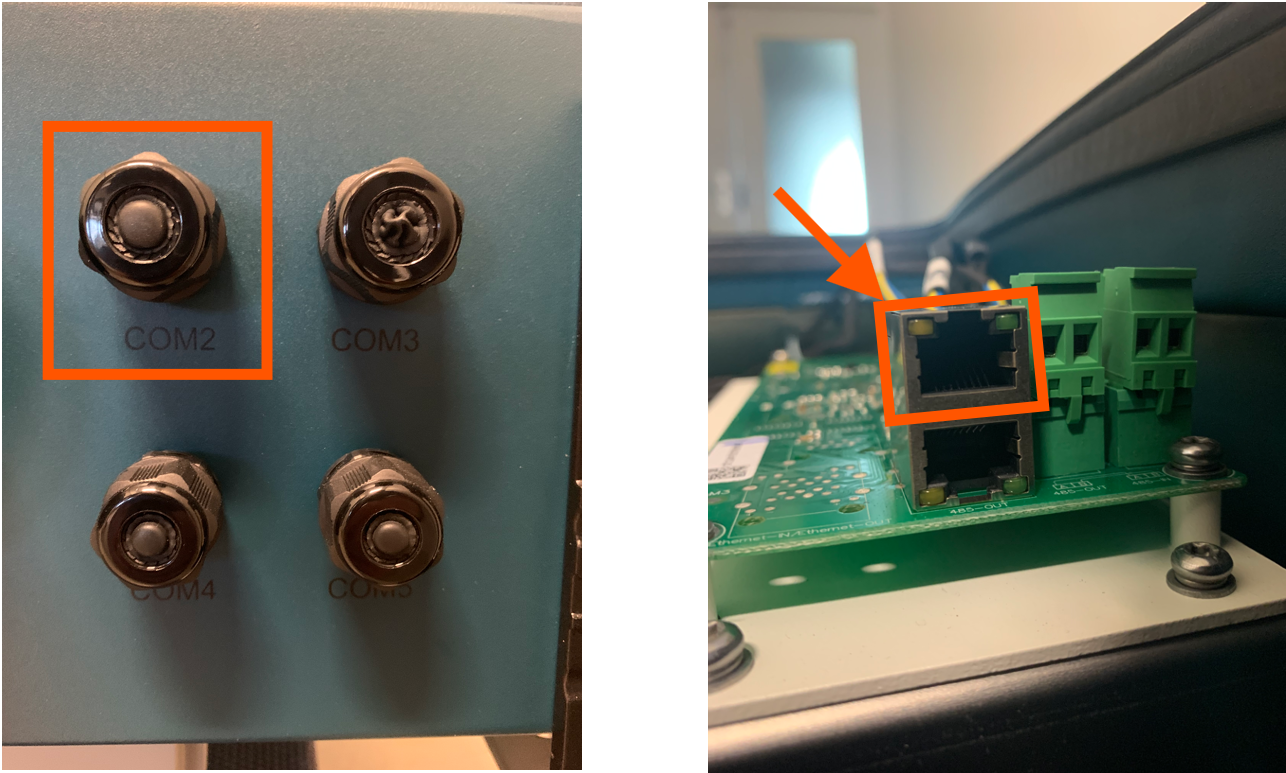
Le port est un port RJ45, utilisé pour la communication RS485.
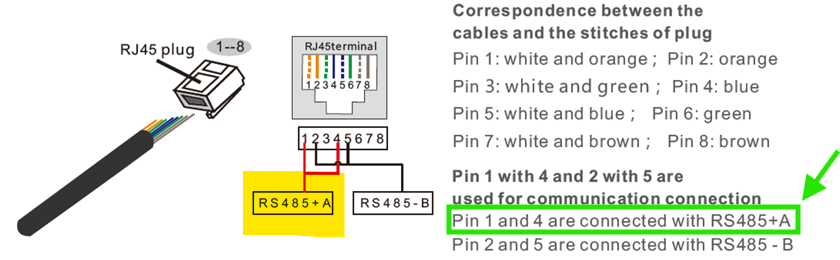
Un câble doit être préparé pour connecter l'onduleur à l'onduleur.
- Insérer le câble dans le connecteur RJ45 puis sertir le connecteur avec une pince à sertir.
- Retirer l'écrou de protection des presse-étoupes étanches étiquetés COM2 et COM3 au niveau
du bas de l'onduleur. Retirer le bouchon de l'embout. - Insérer le connecteur RJ45 dans le port RJ45 dans la chambre de maintenance de l'onduleur.
- Remettre les écrous de protection pour COM2/3 et serrer fermement.
Info
RS485 Wiring
- For correct RS485 wiring: Follow the guidelines for RS485 wiring.
- If the wiring shown in the table below is incorrect, please let us know.
- There is no general consensus in the industry about the usage of A and B for the RS485 polarity, so it may be counterintuitive and opposite of what you might expect for some devices.
| Device | Sofar EMS model OM1 | Sofar EMS model IG8 | RS485-USB converter | RS485-Ethernet converter |
|---|---|---|---|---|
| Pin 3 | RS485 A | RS485_POS | RS485 A | TX+ |
| Pin 4 | RS485 B | RS485_NEG | RS485 B | TX- |
| N/A | RS GND | GND | Not available | G |
Avertissement
NOTE: RS485 Device Addresses
- You MUST give each device on the RS485 bus a unique address. Check the manual of the device on how to do this.
- Use lower addresses first (1, 2, ...) because the Sofar EMS will find them faster!
- For each device, it is generally recommended to stick with the factory default baud rate, parity, and stop bits. The Sofar EMS will scan on those first.
Last updated March 11, 2026Edit this page